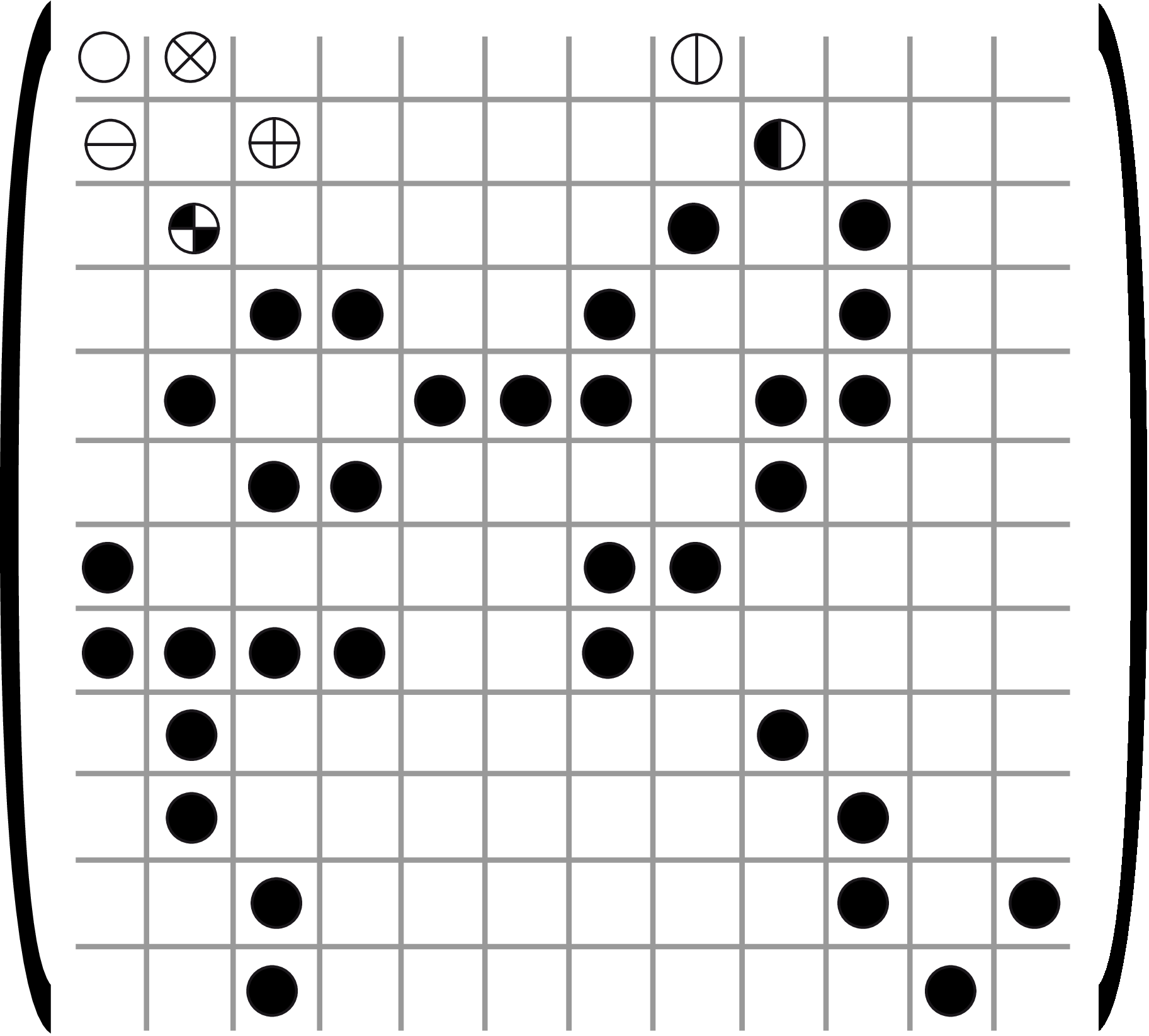
Figure 5: Example of sparse matrix
The EXT, CUDA and RSB subdirectories contains a set of extensions to the base library. The extensions provide additional storage formats beyond the ones already contained in the base library, as well as interfaces to:
SPGPU
a CUDA library originally published as https://code.google.com/p/spgpu/ and now included in the cuda subdir, for computations on NVIDIA GPUs;
LIBRSB
http://sourceforge.net/projects/librsb/, for computations on multicore parallel machines.
The infrastructure laid out in the base library to allow for these extensions is detailed in the references [20, 21, 10]; the CUDA-specific data formats are described in [22].
A sample application using the PSBLAS extensions will contain the following steps:
USE the appropriat modules (psb_ext_mod, psb_cuda_mod);
Declare a mold variable of the necessary type (e.g. psb_d_ell_sparse_mat, psb_d_hlg_sparse_mat, psb_d_vect_cuda);
Pass the mold variable to the base library interface where needed to ensure the appropriate dynamic type.
Suppose you want to use the CUDA-enabled ELLPACK data structure; you would use a piece of code like this (and don’t forget, you need CUDA-side vectors along with the matrices):
program my_cuda_test use psb_base_mod use psb_util_mod use psb_ext_mod use psb_cuda_mod type(psb_dspmat_type) :: a, agpu type(psb_d_vect_type) :: x, xg, bg real(psb_dpk_), allocatable :: xtmp(:) type(psb_d_vect_cuda) :: vmold type(psb_d_elg_sparse_mat) :: aelg type(psb_ctxt_type) :: ctxt integer :: iam, np call psb_init(ctxt) call psb_info(ctxt,iam,np) call psb_cuda_init(ctxt, iam) ! My own home-grown matrix generator call gen_matrix(ctxt,idim,desc_a,a,x,info) if (info /= 0) goto 9999 call a%cscnv(agpu,info,mold=aelg) if (info /= 0) goto 9999 xtmp = x%get_vect() call xg%bld(xtmp,mold=vmold) call bg%bld(size(xtmp),mold=vmold) ! Do sparse MV call psb_spmm(done,agpu,xg,dzero,bg,desc_a,info) 9999 continue if (info == 0) then write(*,*) ’42’ else write(*,*) ’Something went wrong ’,info end if call psb_cuda_exit() call psb_exit(ctxt) stop end program my_cuda_test
A full example of this strategy can be seen in the test/ext/kernel and test/cuda/kernel subdirectories, where we provide sample programs to test the speed of the sparse matrix-vector product with the various data structures included in the library.
Access to the facilities provided by the EXT library is mainly achieved through the data types that are provided within. The data classes are derived from the base classes in PSBLAS, through the Fortran 2003 mechanism of type extension [17].
The data classes are divided between the general purpose CPU extensions, the GPU interfaces and the RSB interfaces. In the description we will make use of the notation introduced in Table 21.
| Name | Description |
| M | Number of rows in matrix |
| N | Number of columns in matrix |
| NZ | Number of nonzeros in matrix |
| AVGNZR | Average number of nonzeros per row |
| MAXNZR | Maximum number of nonzeros per row |
| NDIAG | Numero of nonzero diagonals |
| AS | Coefficients array |
| IA | Row indices array |
| JA | Column indices array |
| IRP | Row start pointers array |
| JCP | Column start pointers array |
| NZR | Number of nonzeros per row array |
| OFFSET | Offset for diagonals |
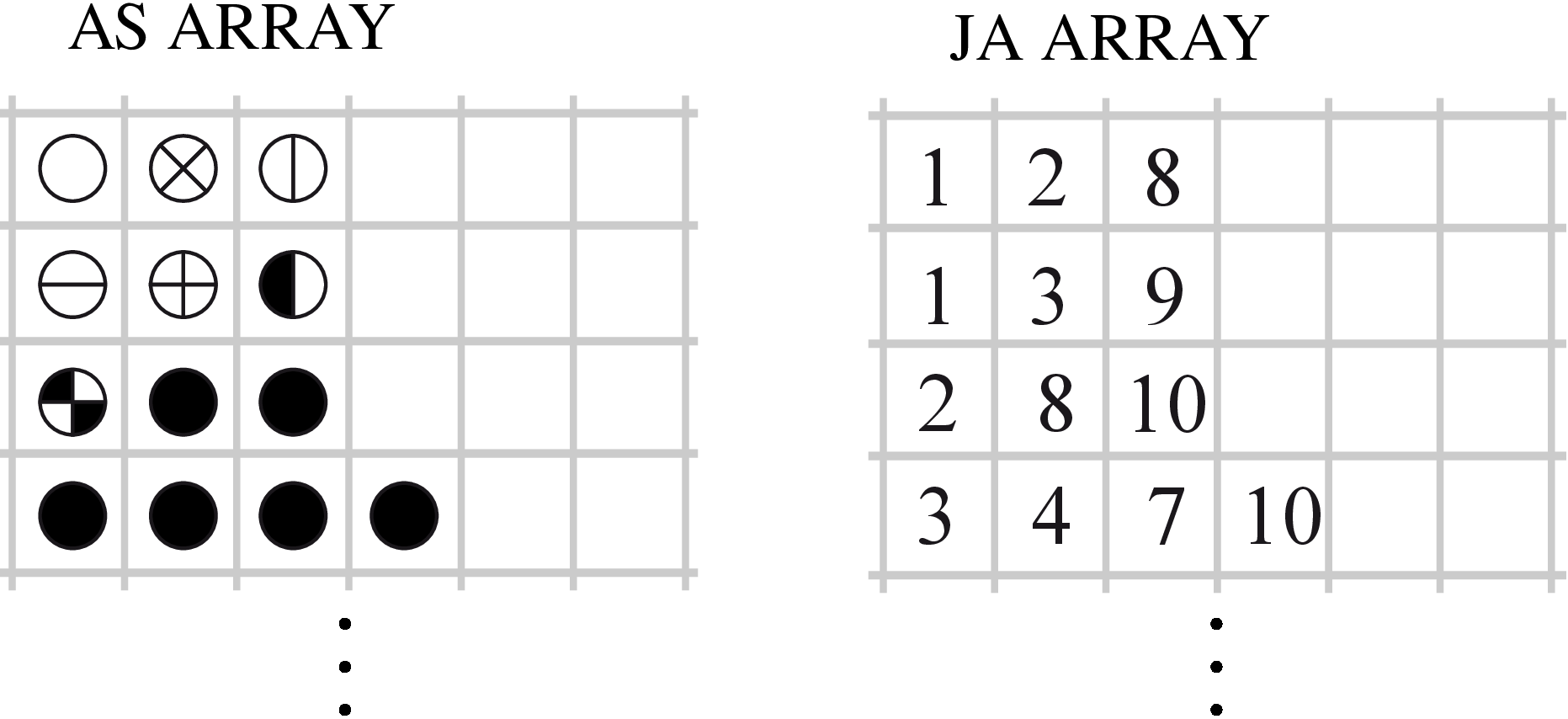
The ELLPACK/ITPACK format (shown in Figure 6) comprises two 2-dimensional arrays AS and JA with M rows and MAXNZR columns, where MAXNZR is the maximum number of nonzeros in any row [?]. Each row of the arrays AS and JA contains the coefficients and column indices; rows shorter than MAXNZR are padded with zero coefficients and appropriate column indices, e.g. the last valid one found in the same row.
do i=1,n t=0 do j=1,maxnzr t = t + as(i,j)*x(ja(i,j)) end do y(i) = t end doAlgorithm 1: Matrix-Vector product in ELL format
The matrix-vector product y = Ax can be computed with the code shown in Alg. 1; it costs one memory write per outer iteration, plus three memory reads and two floating-point operations per inner iteration.
Unless all rows have exactly the same number of nonzeros, some of the coefficients in the AS array will be zeros; therefore this data structure will have an overhead both in terms of memory space and redundant operations (multiplications by zero). The overhead can be acceptable if:
The maximum number of nonzeros per row is not much larger than the average;
The regularity of the data structure allows for faster code, e.g. by allowing vectorization, thereby offsetting the additional storage requirements.
In the extreme case where the input matrix has one full row, the ELLPACK structure would require more memory than the normal 2D array storage. The ELLPACK storage format was very popular in the vector computing days; in modern CPUs it is not quite as popular, but it is the basis for many GPU formats.
The relevant data type is psb_T_ell_sparse_mat:
type, extends(psb_d_base_sparse_mat) :: psb_d_ell_sparse_mat ! ! ITPACK/ELL format, extended. ! integer(psb_ipk_), allocatable :: irn(:), ja(:,:), idiag(:) real(psb_dpk_), allocatable :: val(:,:) contains .... end type psb_d_ell_sparse_mat
The hacked ELLPACK (HLL) format alleviates the main problem of the ELLPACK format, that is, the amount of memory required by padding for sparse matrices in which the maximum row length is larger than the average.
The number of elements allocated to padding is [(m*maxNR) - (m*avgNR) = m* (maxNR-avgNR)] for both AS and JA arrays, where m is equal to the number of rows of the matrix, maxNR is the maximum number of nonzero elements in every row and avgNR is the average number of nonzeros. Therefore a single densely populated row can seriously affect the total size of the allocation.
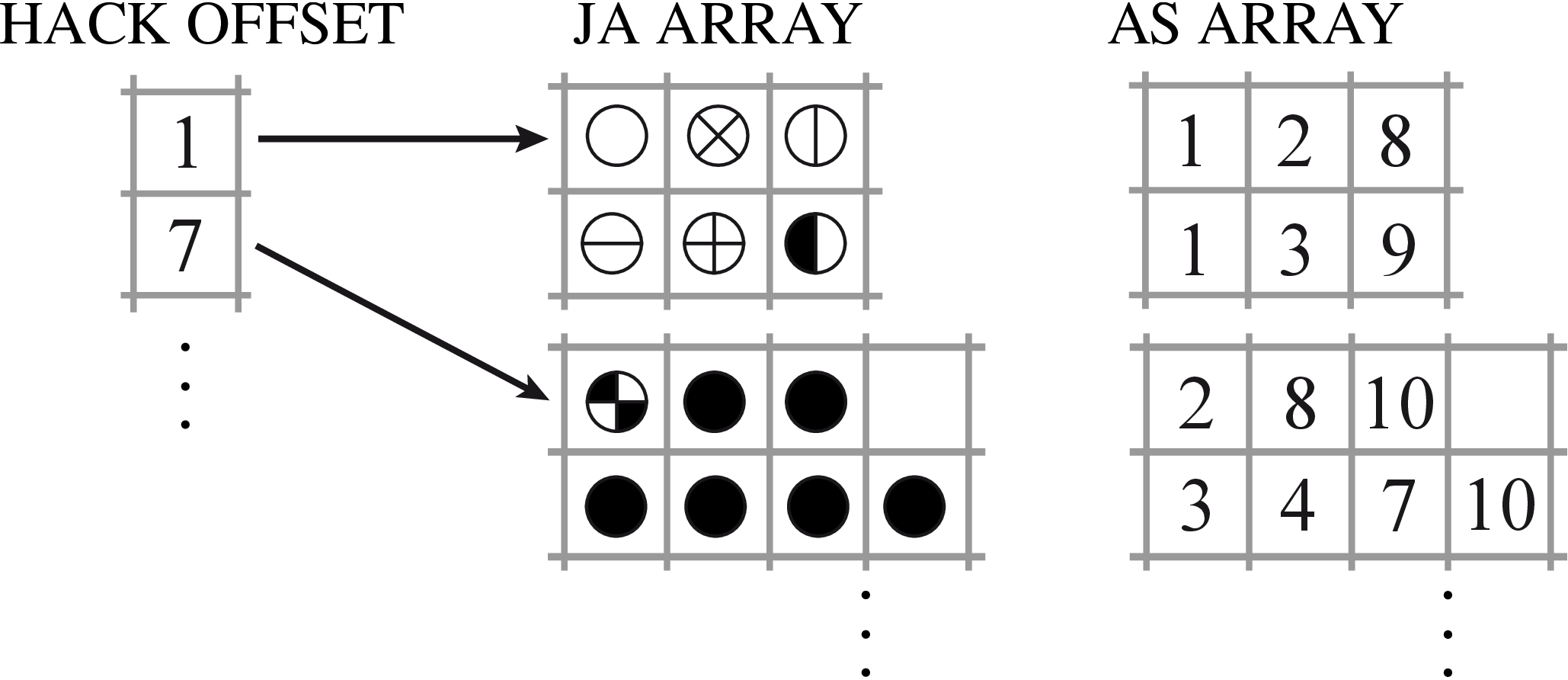
To limit this effect, in the HLL format we break the original matrix into equally sized groups of rows (called hacks), and then store these groups as independent matrices in ELLPACK format. The groups can be arranged selecting rows in an arbitrarily manner; indeed, if the rows are sorted by decreasing number of nonzeros we obtain essentially the JAgged Diagonals format. If the rows are not in the original order, then an additional vector rIdx is required, storing the actual row index for each row in the data structure.
The multiple ELLPACK-like buffers are stacked together inside a single, one dimensional array; an additional vector hackOffsets is provided to keep track of the individual submatrices. All hacks have the same number of rows hackSize; hence, the hackOffsets vector is an array of (m∕hackSize) + 1 elements, each one pointing to the first index of a submatrix inside the stacked cM/rP buffers, plus an additional element pointing past the end of the last block, where the next one would begin. We thus have the property that the elements of the k-th hack are stored between hackOffsets[k] and hackOffsets[k+1], similarly to what happens in the CSR format.
With this data structure a very long row only affects one hack, and therefore the additional memory is limited to the hack in which the row appears.
The relevant data type is psb_T_hll_sparse_mat:
type, extends(psb_d_base_sparse_mat) :: psb_d_hll_sparse_mat ! ! HLL format. (Hacked ELL) ! integer(psb_ipk_) :: hksz integer(psb_ipk_), allocatable :: irn(:), ja(:), idiag(:), hkoffs(:) real(psb_dpk_), allocatable :: val(:) contains .... end type
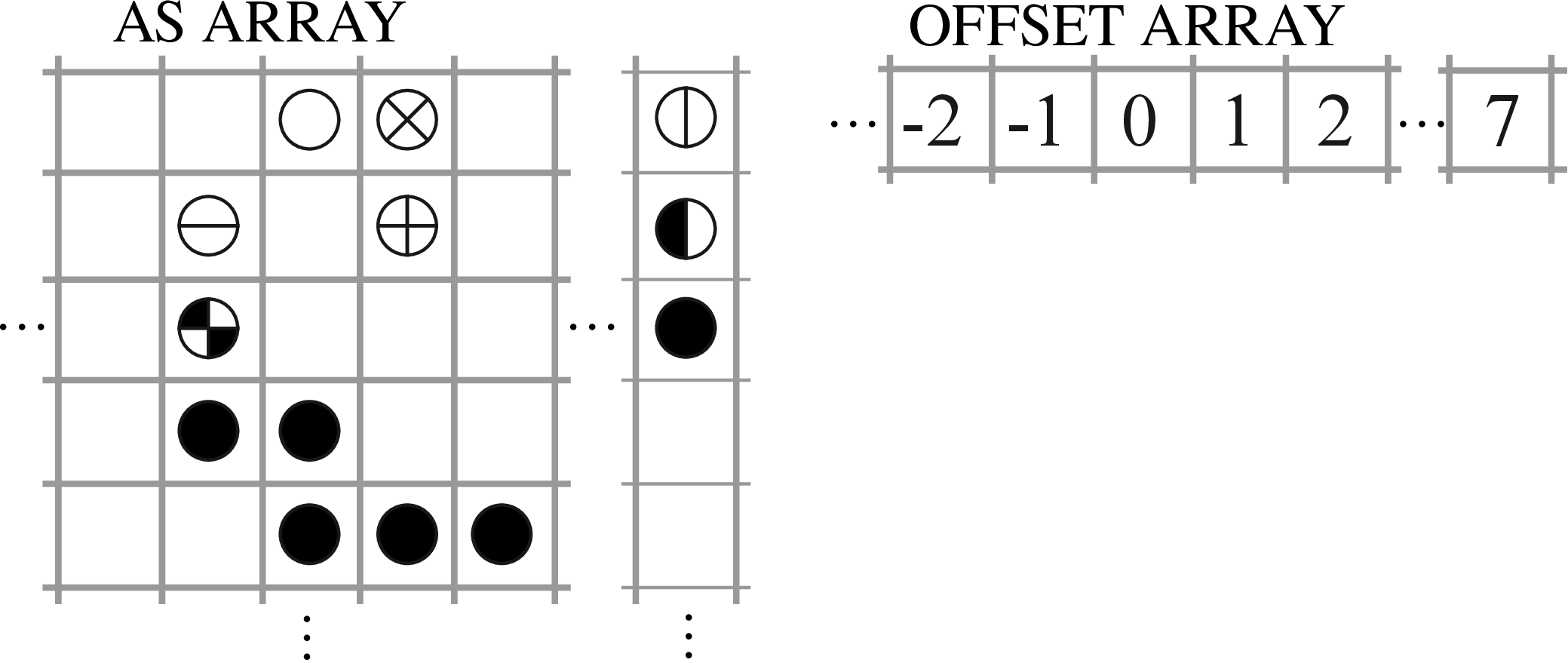
The DIAgonal (DIA) format (shown in Figure 8) has a 2-dimensional array AS containing in each column the coefficients along a diagonal of the matrix, and an integer array OFFSET that determines where each diagonal starts. The diagonals in AS are padded with zeros as necessary.
The code to compute the matrix-vector product y = Ax is shown in Alg. 2; it costs one memory read per outer iteration, plus three memory reads, one memory write and two floating-point operations per inner iteration. The accesses to AS and x are in strict sequential order, therefore no indirect addressing is required.
do j=1,ndiag if (offset(j) > 0) then ir1 = 1; ir2 = m - offset(j); else ir1 = 1 - offset(j); ir2 = m; end if do i=ir1,ir2 y(i) = y(i) + alpha*as(i,j)*x(i+offset(j)) end do end do
The relevant data type is psb_T_dia_sparse_mat:
type, extends(psb_d_base_sparse_mat) :: psb_d_dia_sparse_mat ! ! DIA format, extended. ! integer(psb_ipk_), allocatable :: offset(:) integer(psb_ipk_) :: nzeros real(psb_dpk_), allocatable :: data(:,:) end type
Storage by DIAgonals is an attractive option for matrices whose coefficients are located on a small set of diagonals, since they do away with storing explicitly the indices and therefore reduce significantly memory traffic. However, having a few coefficients outside of the main set of diagonals may significantly increase the amount of needed padding; moreover, while the DIA code is easily vectorized, it does not necessarily make optimal use of the memory hierarchy. While processing each diagonal we are updating entries in the output vector y, which is then accessed multiple times; if the vector y is too large to remain in the cache memory, the associated cache miss penalty is paid multiple times.
The hacked DIA (HDIA) format was designed to contain the amount of padding, by breaking the original matrix into equally sized groups of rows (hacks), and then storing these groups as independent matrices in DIA format. This approach is similar to that of HLL, and requires using an offset vector for each submatrix. Again, similarly to HLL, the various submatrices are stacked inside a linear array to improve memory management. The fact that the matrix is accessed in slices helps in reducing cache misses, especially regarding accesses to the vector y.
An additional vector hackOffsets is provided to complete the matrix format; given that hackSize is the number of rows of each hack, the hackOffsets vector is made by an array of (m∕hackSize) + 1 elements, pointing to the first diagonal offset of a submatrix inside the stacked offsets buffers, plus an additional element equal to the number of nonzero diagonals in the whole matrix. We thus have the property that the number of diagonals of the k-th hack is given by hackOffsets[k+1] - hackOffsets[k].
The relevant data type is psb_T_hdia_sparse_mat:
type pm real(psb_dpk_), allocatable :: data(:,:) end type pm type po integer(psb_ipk_), allocatable :: off(:) end type po type, extends(psb_d_base_sparse_mat) :: psb_d_hdia_sparse_mat ! ! HDIA format, extended. ! type(pm), allocatable :: hdia(:) type(po), allocatable :: offset(:) integer(psb_ipk_) :: nblocks, nzeros integer(psb_ipk_) :: hack = 64 integer(psb_long_int_k_) :: dim=0 contains .... end type
For computing with CUDA we define a dual memorization strategy in which each variable on the CPU (“host”) side has a GPU (“device”) side. When a GPU-type variable is initialized, the data contained is (usually) the same on both sides. Each operator invoked on the variable may change the data so that only the host side or the device side are up-to-date.
Keeping track of the updates to data in the variables is essential: we want to perform most computations on the GPU, but we cannot afford the time needed to move data between the host memory and the device memory because the bandwidth of the interconnection bus would become the main bottleneck of the computation. Thus, each and every computational routine in the library is built according to the following principles:
If the data type being handled is GPU-enabled, make sure that its device copy is up to date, perform any arithmetic operation on the GPU, and if the data has been altered as a result, mark the main-memory copy as outdated.
The main-memory copy is never updated unless this is requested by the user either
explicitly
by invoking a synchronization method;
implicitly
by invoking a method that involves other data items that are not GPU-enabled, e.g., by assignment ov a vector to a normal array.
In this way, data items are put on the GPU memory “on demand” and remain there as long as “normal” computations are carried out. As an example, the following call to a matrix-vector product
call psb_spmm(alpha,a,x,beta,y,desc_a,info)
will transparently and automatically be performed on the GPU whenever all three data
inputs a, x and y are GPU-enabled. If a program makes many such calls sequentially,
then
The first kernel invocation will find the data in main memory, and will copy it to the GPU memory, thus incurring a significant overhead; the result is however not copied back, and therefore:
Subsequent kernel invocations involving the same vector will find the data on the GPU side so that they will run at full speed.
For all invocations after the first the only data that will have to be transferred to/from
the main memory will be the scalars alpha and beta, and the return code
info.
Vectors:
The data type psb_T_vect_gpu provides a GPU-enabled extension of
the inner type psb_T_base_vect_type, and must be used together with
the other inner matrix type to make full use of the GPU computational
capabilities;
CSR:
The data type psb_T_csrg_sparse_mat provides an interface to the GPU
version of CSR available in the NVIDIA CuSPARSE library;
HYB:
The data type psb_T_hybg_sparse_mat provides an interface to the HYB
GPU storage available in the NVIDIA CuSPARSE library. The internal
structure is opaque, hence the host side is just CSR; the HYB data format
is only available up to CUDA version 10.
ELL:
The data type psb_T_elg_sparse_mat provides an interface to the
ELLPACK implementation from SPGPU;
HLL:
The data type psb_T_hlg_sparse_mat provides an interface to the Hacked
ELLPACK implementation from SPGPU;
HDIA:
The data type psb_T_hdiag_sparse_mat provides an interface to the
Hacked DIAgonals implementation from SPGPU;